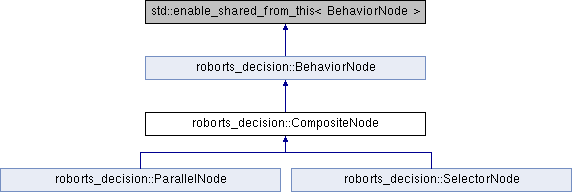
Behavior tree composite node inherited from BehaviorNode. More...
#include <behavior_node.h>
Public Member Functions | |
| CompositeNode (std::string name, BehaviorType behavior_type, const Blackboard::Ptr &blackboard_ptr) | |
| Constructor of CompositeNode. More... | |
| virtual | ~CompositeNode ()=default |
| virtual void | AddChildren (const BehaviorNode::Ptr &child_node_ptr) |
| Add child behavior node to the composite node. More... | |
| virtual void | AddChildren (std::initializer_list< BehaviorNode::Ptr > child_node_ptr_list) |
| Add a list of child behavior nodes to the composite node. More... | |
| virtual BehaviorNode::Ptr | GetChild () |
| Get the child behavior node that it is turn to tick. More... | |
| std::vector< BehaviorNode::Ptr > & | GetChildren () |
| Get the list of child behavior nodes. More... | |
| unsigned int | GetChildrenIndex () |
| Get the index of the child behavior node that it is turn to tick. More... | |
| unsigned int | GetChildrenNum () |
| Get the number of child behavior nodes. More... | |
 Public Member Functions inherited from roborts_decision::BehaviorNode Public Member Functions inherited from roborts_decision::BehaviorNode | |
| BehaviorNode () | |
| BehaviorNode (std::string name, BehaviorType behavior_type, const Blackboard::Ptr &blackboard_ptr) | |
| Constructor of BehaviorNode. More... | |
| virtual | ~BehaviorNode ()=default |
| BehaviorState | Run () |
| Run the behavior node. More... | |
| virtual void | Reset () |
| Reset the behavior node. More... | |
| BehaviorType | GetBehaviorType () |
| Get the type of the behavior node. More... | |
| BehaviorState | GetBehaviorState () |
| Get the state of the behavior node. More... | |
| std::string | GetName () |
| Get the name of the behavior node. More... | |
| void | SetParent (BehaviorNode::Ptr parent_node_ptr) |
| Set the parent of the behavior node. More... | |
| BehaviorNode::Ptr | GetParent () |
| Get the parent node of the behavior node. More... | |
| unsigned int | GetLevel () |
| Get the level of the behavior node. More... | |
| void | SetLevel (unsigned int level) |
| Set the level of the behavior node. More... | |
Protected Member Functions | |
| virtual BehaviorState | Update ()=0 |
| Tick the node and update the state of the behavior node. More... | |
| virtual void | OnInitialize ()=0 |
| Initialize something before starting to tick the node. More... | |
| virtual void | OnTerminate (BehaviorState state)=0 |
| Recover or reset something After getting the result. More... | |
Protected Attributes | |
| std::vector< BehaviorNode::Ptr > | children_node_ptr_ |
| the list of child nodes More... | |
| unsigned int | children_node_index_ |
| the index of child nodes More... | |
| Protected Attributes inherited from roborts_decision::BehaviorNode | |
| std::string | name_ |
| Node name. More... | |
| BehaviorState | behavior_state_ |
| State. More... | |
| BehaviorType | behavior_type_ |
| Type. More... | |
| Blackboard::Ptr | blackboard_ptr_ |
| Blackboard. More... | |
| BehaviorNode::Ptr | parent_node_ptr_ |
| Parent Node Pointer. More... | |
| unsigned int | level_ |
| Level of the tree. More... | |
Additional Inherited Members | |
| Public Types inherited from roborts_decision::BehaviorNode | |
| typedef std::shared_ptr< BehaviorNode > | Ptr |
Detailed Description
Behavior tree composite node inherited from BehaviorNode.
Constructor & Destructor Documentation
◆ CompositeNode()
|
inline |
Constructor of CompositeNode.
- Parameters
-
name Name of the behavior node behavior_type Type of the behavior node blackboard_ptr Blackboard of the behavior node
◆ ~CompositeNode()
|
virtualdefault |
Member Function Documentation
◆ AddChildren() [1/2]
|
inlinevirtual |
Add child behavior node to the composite node.
- Parameters
-
child_node_ptr The expected child behavior node
◆ AddChildren() [2/2]
|
inlinevirtual |
Add a list of child behavior nodes to the composite node.
- Parameters
-
child_node_ptr A list of the expected child behavior nodes
◆ GetChild()
|
inlinevirtual |
Get the child behavior node that it is turn to tick.
- Returns
- The child behavior node
Reimplemented from roborts_decision::BehaviorNode.
◆ GetChildren()
|
inline |
Get the list of child behavior nodes.
- Returns
- The list of child behavior nodes
◆ GetChildrenIndex()
|
inline |
Get the index of the child behavior node that it is turn to tick.
- Returns
- The index of the child behavior node that it is turn to tick
◆ GetChildrenNum()
|
inline |
Get the number of child behavior nodes.
- Returns
- The number of child behavior nodes
◆ OnInitialize()
|
protectedpure virtual |
Initialize something before starting to tick the node.
Implements roborts_decision::BehaviorNode.
Implemented in roborts_decision::ParallelNode, and roborts_decision::SelectorNode.
◆ OnTerminate()
|
protectedpure virtual |
Recover or reset something After getting the result.
- Parameters
-
state Input behavior state
Implements roborts_decision::BehaviorNode.
Implemented in roborts_decision::ParallelNode, and roborts_decision::SelectorNode.
◆ Update()
|
protectedpure virtual |
Tick the node and update the state of the behavior node.
- Returns
- the state of the behavior node
Implements roborts_decision::BehaviorNode.
Implemented in roborts_decision::ParallelNode, and roborts_decision::SelectorNode.
Member Data Documentation
◆ children_node_index_
|
protected |
the index of child nodes
◆ children_node_ptr_
|
protected |
the list of child nodes
The documentation for this class was generated from the following file:
- src/ICRA-Firefly-RoboRTS/roborts_decision/behavior_tree/behavior_node.h
