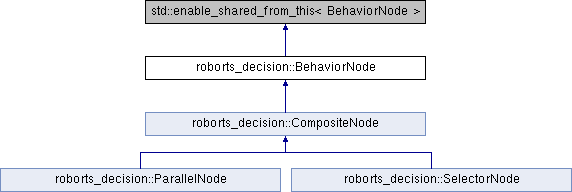
Behavior tree base node.
More...
#include <behavior_node.h>
Behavior tree base node.
@brif Abort Type of behavior tree precondition node
For more information refer to https://docs.unrealengine.com/en-us/Engine/AI/BehaviorTrees/NodeReference/Decorators
◆ Ptr
◆ BehaviorNode() [1/2]
| roborts_decision::BehaviorNode::BehaviorNode |
( |
| ) |
|
|
inline |
◆ BehaviorNode() [2/2]
Constructor of BehaviorNode.
- Parameters
-
| name | Name of the behavior node |
| behavior_type | Type of the behavior node |
| blackboard_ptr | Blackboard of the behavior node |
◆ ~BehaviorNode()
| virtual roborts_decision::BehaviorNode::~BehaviorNode |
( |
| ) |
|
|
virtualdefault |
◆ GetBehaviorState()
| BehaviorState roborts_decision::BehaviorNode::GetBehaviorState |
( |
| ) |
|
|
inline |
Get the state of the behavior node.
- Returns
- The state of the behavior node
◆ GetBehaviorType()
| BehaviorType roborts_decision::BehaviorNode::GetBehaviorType |
( |
| ) |
|
|
inline |
Get the type of the behavior node.
- Returns
- The type of the behavior node
◆ GetChild()
Get the child node of the behavior node.
- Returns
- The child node of the behavior node, for the base class it always returns nullptr
Reimplemented in roborts_decision::CompositeNode.
◆ GetLevel()
| unsigned int roborts_decision::BehaviorNode::GetLevel |
( |
| ) |
|
|
inline |
Get the level of the behavior node.
- Returns
- The level of the behavior node
◆ GetName()
| std::string roborts_decision::BehaviorNode::GetName |
( |
| ) |
|
|
inline |
Get the name of the behavior node.
- Returns
- The name of the behavior node
◆ GetParent()
Get the parent node of the behavior node.
- Returns
- The parent node of the behavior node
◆ OnInitialize()
| virtual void roborts_decision::BehaviorNode::OnInitialize |
( |
| ) |
|
|
protectedpure virtual |
◆ OnTerminate()
| virtual void roborts_decision::BehaviorNode::OnTerminate |
( |
BehaviorState |
state | ) |
|
|
protectedpure virtual |
◆ Reset()
| virtual void roborts_decision::BehaviorNode::Reset |
( |
| ) |
|
|
inlinevirtual |
Reset the behavior node.
manually invoke the IDLE terminate function when the node is in running status
◆ Run()
Run the behavior node.
Roughly including 3 process
- OnInitilaize: Initialize or reset some variables, when tick the node that is not running.
- Update: Update and feedback the behavior state.
- OnTerminate: Reset or recover after getting the result.
- Returns
- Behavior state
◆ SetLevel()
| void roborts_decision::BehaviorNode::SetLevel |
( |
unsigned int |
level | ) |
|
|
inline |
Set the level of the behavior node.
- Parameters
-
| level | The expected level of the behavior node |
◆ SetParent()
Set the parent of the behavior node.
- Parameters
-
◆ Update()
◆ behavior_state_
◆ behavior_type_
◆ blackboard_ptr_
◆ level_
| unsigned int roborts_decision::BehaviorNode::level_ |
|
protected |
◆ name_
| std::string roborts_decision::BehaviorNode::name_ |
|
protected |
◆ parent_node_ptr_
The documentation for this class was generated from the following file: